
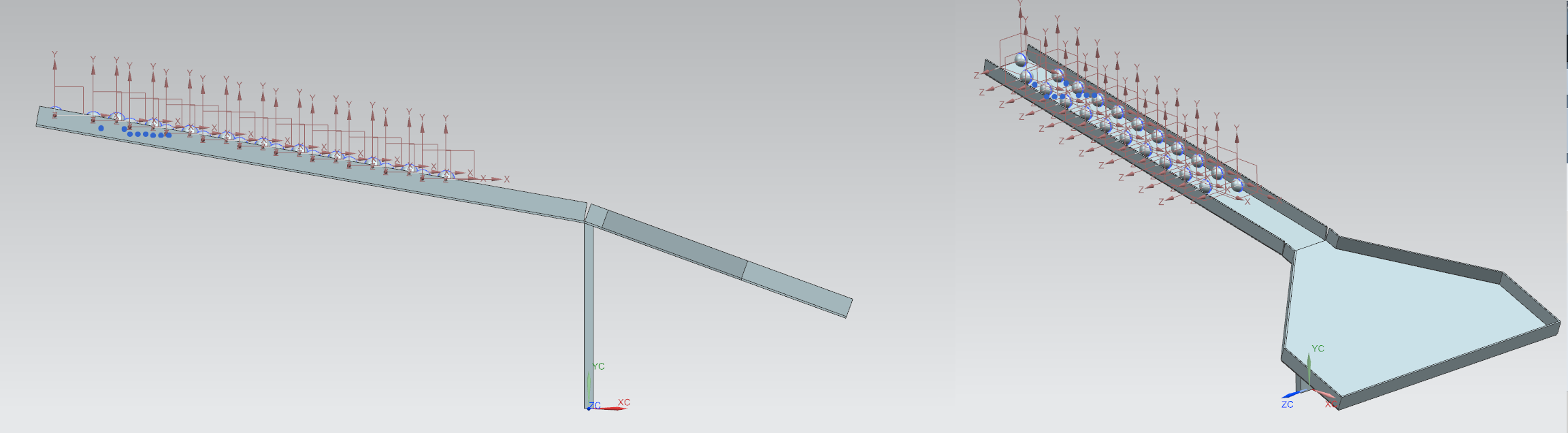
Добрый день! Стоит задача смоделировать качение большого количества шаров по наклонному желобу с заслонкой внизу, у которой эти шары будут собираться. Вопрос следующий: есть ли в NX motion функция создания контакта каждого тела с каждым? Или какой-то макрос может быть? Поскольку задавать для каждого шара связи со всеми остальными - перспектива так себе. Заранее спасибо за ответы!